자율주행 융합시스템 연구실
(Autonomous Driving Convergence System Lab.)
영남대학교 미래자동차공학과
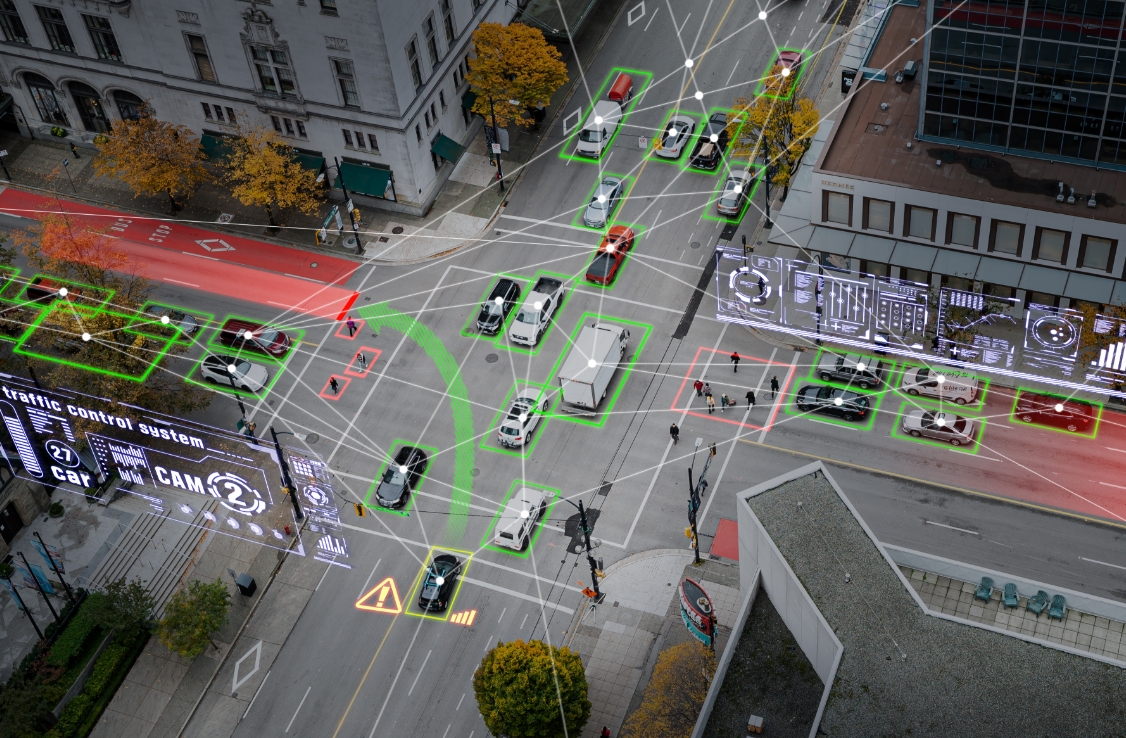
능동형 섀시시스템/전자시스템 설계 및 제어 기술을 이용한 자율주행 차량/운전자/보행자 사고회피, 사고경감, 예방안전, 운전지원 시스템을 연구개발하고 있으며,
특히 AICBM 기반 자율주행 V2X 융합시스템 연계 실도로 실증 및 주행 안전성 향상 기술을 개발하는데 목적을 두고 있습니다.

Research Gallery
자세히 보기
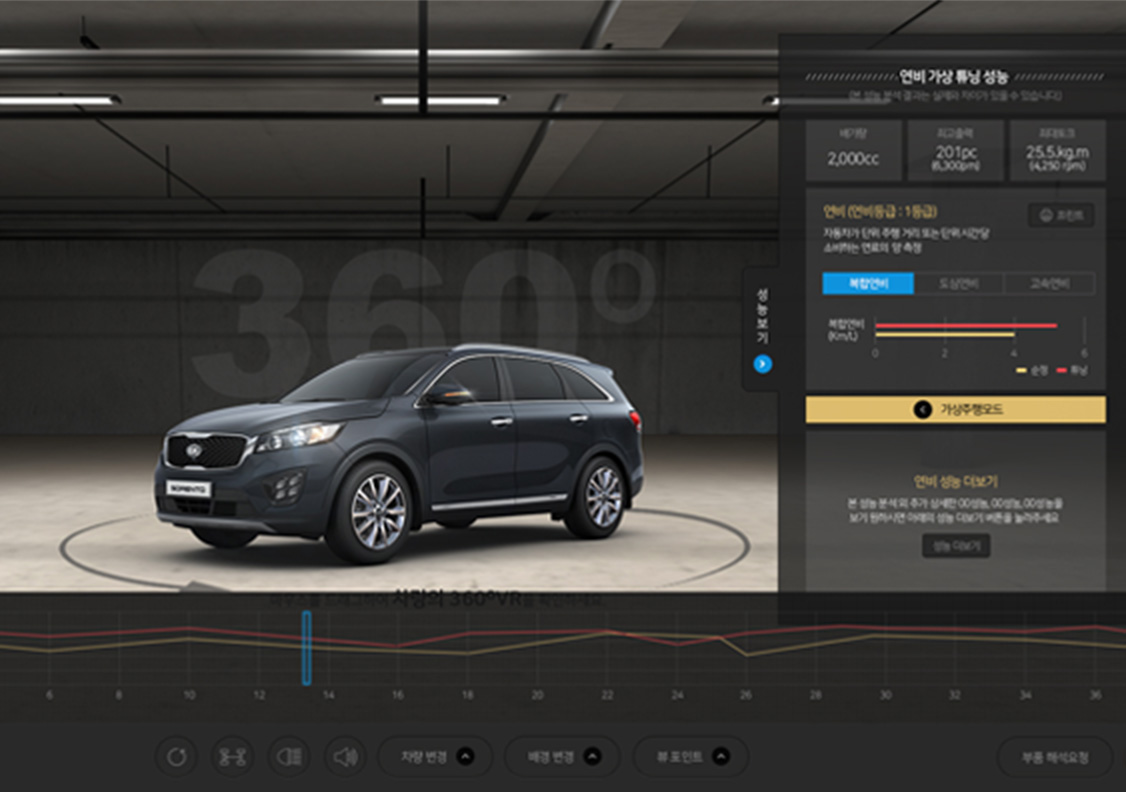
새로운 미래를 만들어가는
미래형 자동차 산업









